Project SAMIRA
The Shunting Assistant & Monitoring Interface for Autonomous Rail Application (SAMIRA) is a project in which the processes on the last mile in rail freight traffic are optimized and digitalized by linking the most modern technologies. By means of a mobile sensor unit, which is attached to the last wagon of the shunting department, the hazardous area can be safely monitored and thus potential collisions can be detected. A second module can optionally be attached to the shunting locomotive or permanently installed, thus preventing collisions in both directions as well. The sensor units provide the driver with images, data and warnings of the danger zone, which are processed by artificial intelligence and visualized by augmented reality to ensure safe shunting even without a shunting assistant. Secure and seamless data transmission to the driver is provided by a redundant, low-latency wireless multipath mesh network (WMMN).
Furthermore, additional stationary modules for track monitoring and an RTK station for precise positioning are connected to the mesh network and enable precise, track-selective positioning of the train. The mesh network is designed so that it can be integrated into the existing infrastructure with little effort and can also be quickly and easily expanded in the future with Logistics 4.0 functions.
Contact Person:
Mr. Sam Münchow
Sam.muenchow@aric-research.de
Drones4Safety
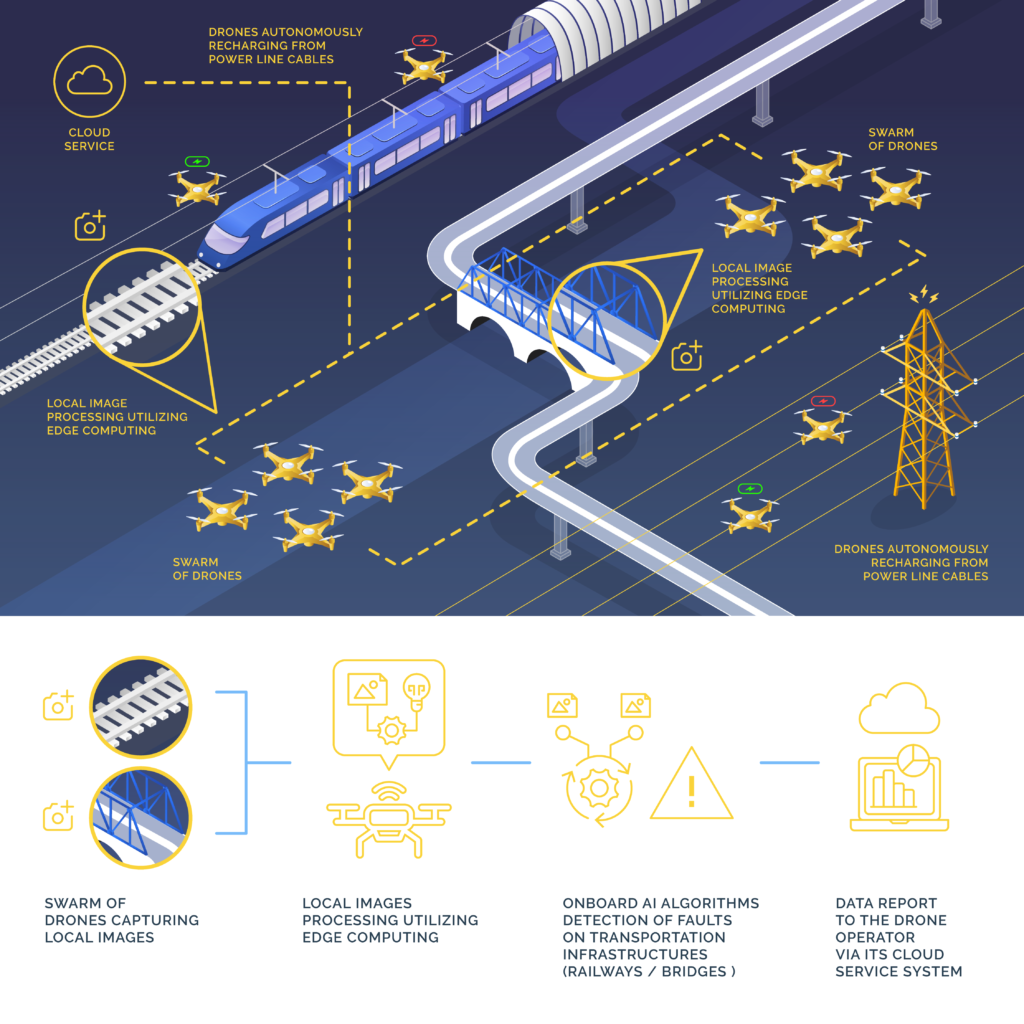
In Drones4Safety, drones are used to perform inspections of roads and rails. Experts from industry, research and academia in the fields of infrastructure inspection, energy harvesting, artificial intelligence, communications and drone technology are working together to improve the safety of Europe’s civil transport system. As part of the EU-funded Drones4Safety project, they are building a cooperative, autonomous, self-charging, and continuously operating drone system for autonomous, accurate, and frequent inspections of transportation infrastructure. This new system will be made available to rail and bridge operators to remotely monitor the condition of their infrastructures and notify them when a fault is detected. The project will use satellite and open maps and develop and improve artificial intelligence (AI) algorithms to optimize inspection results. The results of Drones4Safety will be made available to transport operators in the form of software services and hardware drone systems.
Contact Person:
Mr. Sam Münchow
Sam.muenchow@aric-research.de

Finished Projects
Smart Rail Inspector
In the scope of the SMART Rail Inspector project funded by the EU and NRW (EFRE), a sensor system was developed in order to be able to analyze rails and tracks. On the one hand, severe damage and obstacles are to be detected, and on the other hand, early defects and signs of wear are to be recorded. In addition, all very loud squeaks and rattles can also be displayed. The location of each event will be geo-referenced with centimeter-precision for easy identification by rail maintenance shops. The sensors used are laser triangulation sensors, LIDAR, GNSS, IMU, acoustic sensor and stereo camera, all combined and synchronized into one inspection system. Due to the different sensors, Big Data structures had to be considered for data acquisition and analysis. Due to the large number of different damages and defects, AI methods were used to analyze, identify and classify them.

SRI Messungen auf REDUS 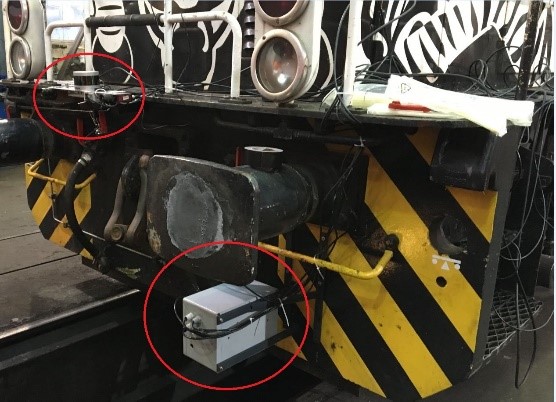
SRI an Lokomotive

Strike3
STRIKE3 was an EU-H2020 funded project. To be able to analyze GNSS interference signals as they occur in reality, monitoring stations were installed in 23 countries around the globe. More than 450,000 GNSS L1/E1 interference signals were then acquired, recorded and analyzed. A central database was defined and implemented to store the characteristic parameters of the acquired interference signals. Finally, the interference signals were used to test receivers for robustness, with six different receivers from four categories such as mass-market, professional, integrated, and timing receivers to analyze their characteristics against real interference.

DETECTOR
DETECTOR was an EU-FP7 funded project dealing with GNSS jamming. After basic spectral analyses of various jammers, a device for detecting this type of jamming was developed and practically tested in the field. This involved using the automotiveGATE test facility to create a safe environment in which to test the effects of jammers on various GPS receivers in vehicle scenarios without affecting public road users. ARIC also hosted a workshop to introduce the DETECTOR project to a wider audience and stakeholders and to demonstrate the DETECTOR solution in live tests.
